My name is Xinye Xiong (熊薪叶) and my research experience is mainly based on Multi-Robot Systems, Robotic Controlling, Optimization Algorithms, Mathematical Machine Learning, Graph Neural Networks, Data Analysis, and Differential Equations. I have been pursuing optimization algorithms in robotic systems and practical machine learning algorithms with high performance via mathematical representations.
Education

Shanghai Jiao Tong University (SJTU), China
M.Sc. in Applied Statistics | Sep. 2021 - Jun. 2023

Southern University of Science and Technology (SUSTech) (Top 10%), China
B.Sc. in Mathematics and Applied Mathematics | Sep. 2017 - Jun. 2021
Research Experiences
[Jun. 2023 - Current] Integrated Framework for Multi-objective Task Allocation and Path Finding in Large-scale Robot Network
Advised by Prof. Hesheng Wang and Prof. Zhe Liu
- An integrated task assignment, path planning, and coordination problem was applied for large-scale robot networks with uncertainties, reaching multiple objectives.
- Simultaneously allocate tasks to distinct robots based on multiple objectives: a novel generalized conflict graph, the electricity of robots, the priority of tasks, and the suitability between robots and tasks, etc.
- The enhanced SMTA helps reach higher optimality, scalability, robustness, and efficiency of the integrated optimization problem.
[Feb. 2023 - Jul. 2023] Selective Multi-Robotic Task Allocation (SMTA) [Paper]
Advised by Prof. Hesheng Wang and Prof. Zhe Liu
- Pose greater attention to tasks with significant influence on the entire system and formulate the problem of critical subset identification mathematically and statistically.
- Propose the SMTA algorithm based on the conditional expectation: precisely assigning tasks within the critical task subset while distributing the remaining jobs with simple strategies.
- Experiments demonstrate that SMTA considerably reduces computational requirements in theory, maximizes task allocation efficiency, and shows high extendability.
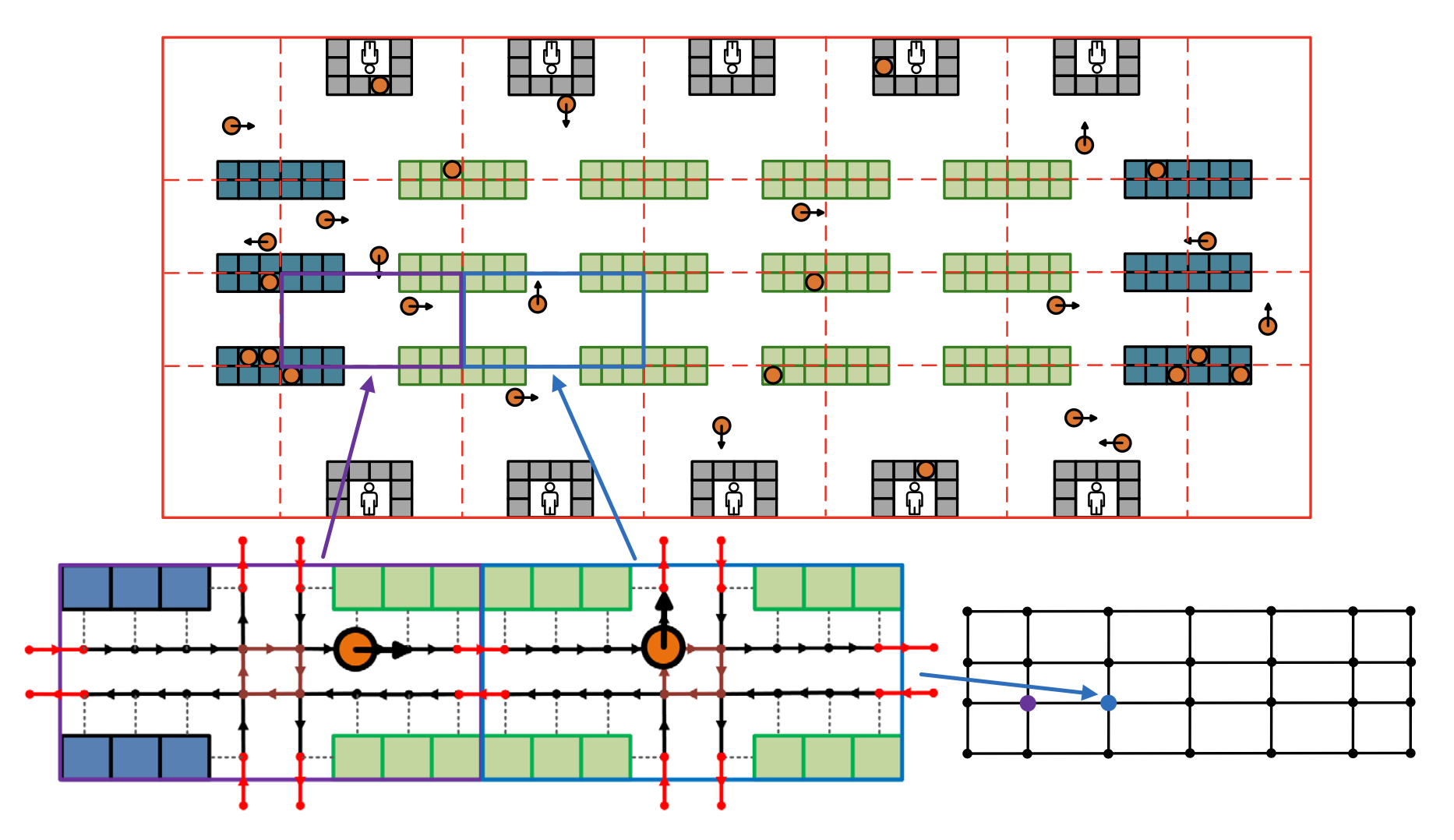
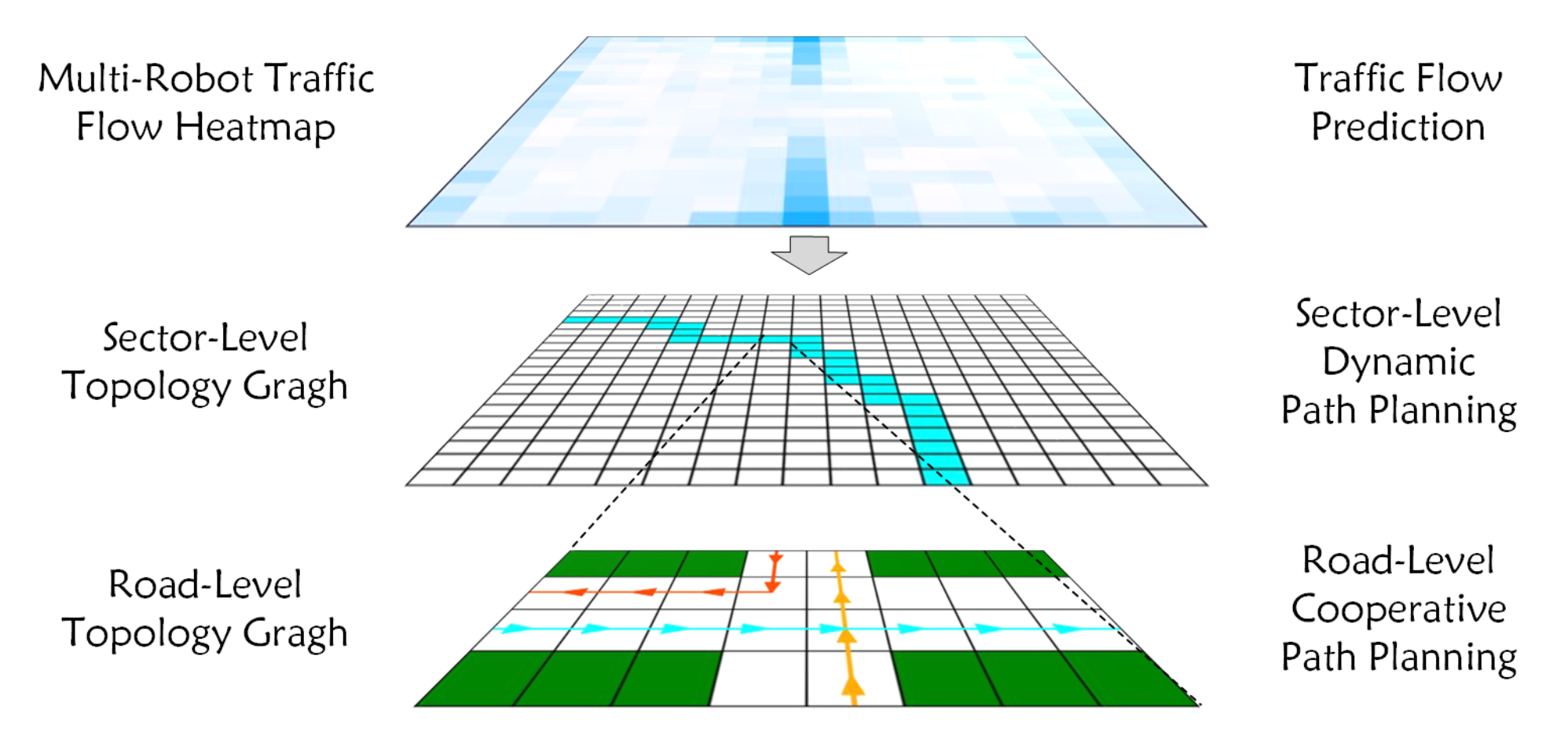
[Sep. 2022 - Jun. 2023] Traffic Flow Learning Enhanced Large-Scale Multi-Robot Cooperative Path Planning Under Uncertainties
Advised by Prof. Hesheng Wang and Prof. Zhe Liu
- Consider traffic flow equilibrium to reduce congestion and increase efficiency. We propose a prediction-based hierarchic path planning framework, including traffic flow prediction, sector-level planning, and road-level coordination.
- In traffic flow prediction, a spatio-temporal GNN predicts the evolution of robot density distribution. Sector-level paths are generated considering travel distance and traffic flow equilibrium simultaneously. CBS algorithm within each sector ensures conflict-free local paths in road-level.
- By explicitly considering motion/communication uncertainties, our approach well-balances the system-level performance, local motion safety, and real-time performance.
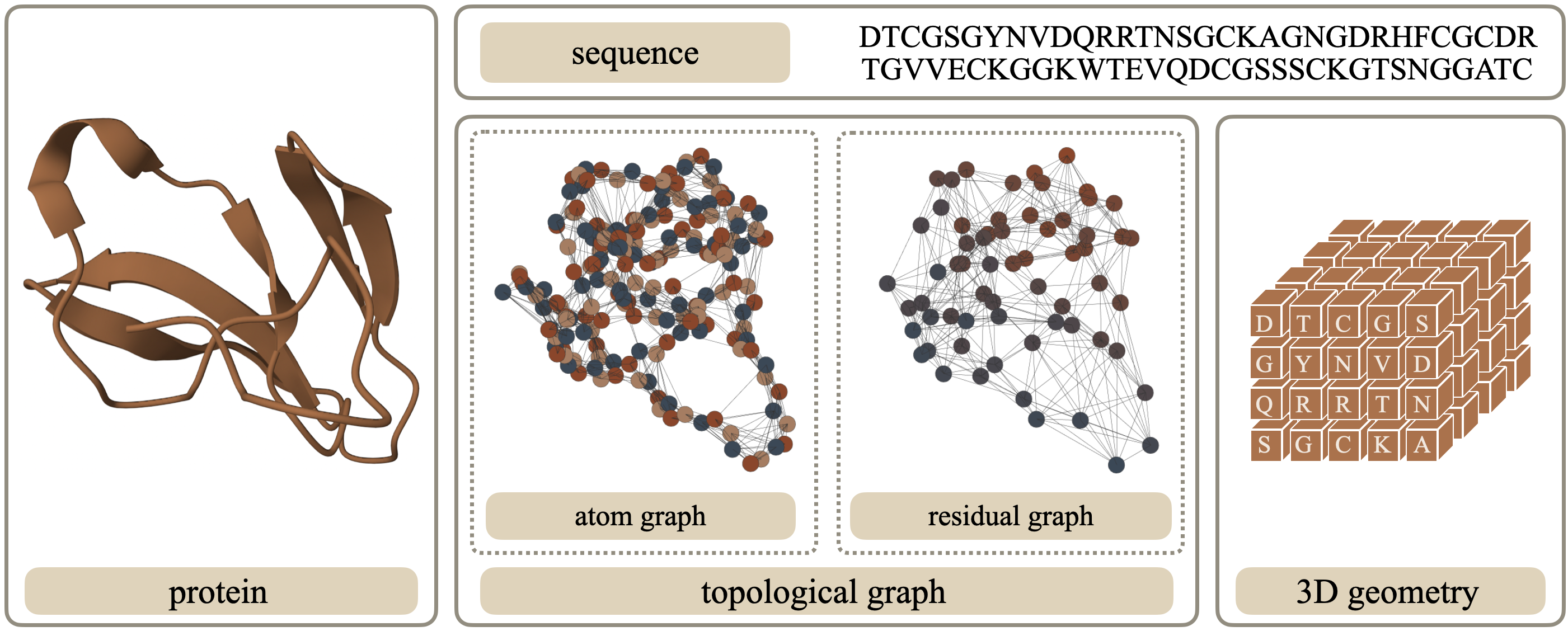
[Sep. 2022 – Apr. 2023] Graph Representation Learning for Interactive Biomolecule Systems [Paper]
Advised by Prof. Yuguang Wang
- Present a comprehensive review of the methodologies used to represent biological molecules and systems as computer-recognizable objects, such as sequences, graphs, and surfaces.
- Examine how geometric deep learning models, especially graph-based techniques, can capture the geometric information of biomolecules at different levels to enable drug discovery, protein characterization, and biological system analysis.
- Conclude with an overview of the current state of biomolecule systems and their mechanisms, highlighting the existing challenges and potential future research directions.
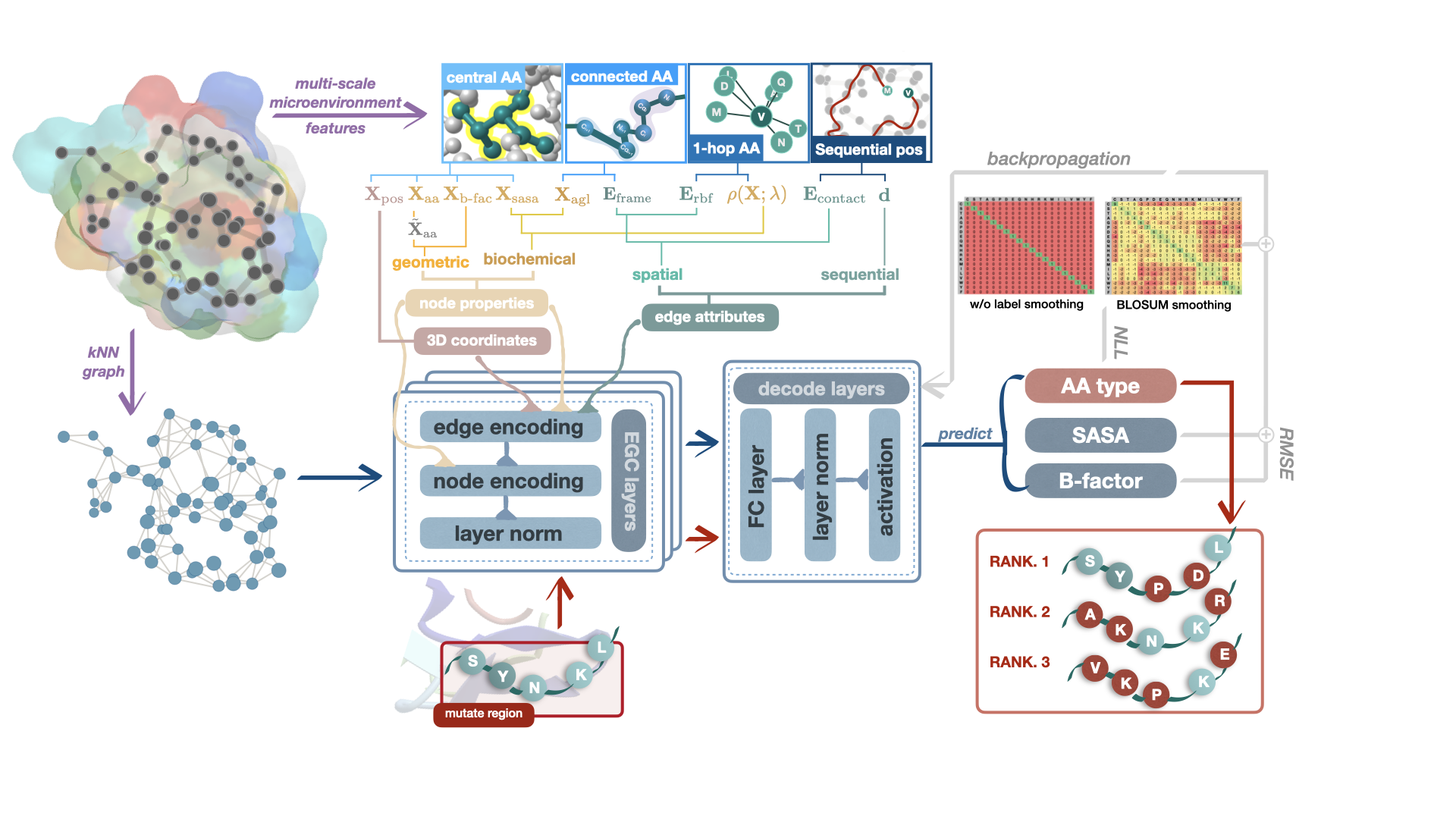
[Jun. 2022 - Nov. 2022] Lightweight Graph Neural Networks in Protein Mutant Design [Paper]
Advised by Prof. Yuguang Wang
- Design a lightweight zero-shot GNN model for multi-task protein representation learning from its 3D structure, tackling the problem of directed evolution in computational protein design.
- Creatively train the model through denoising: recovering the amino acid types and crucial properties of the central residues from a given noisy 3D local environment, instead of traditionally reconstructing and optimizing the protein structure.
- On the prediction of higher-order mutations, the proposed strategy achieves remarkably higher performance by 20% improvement at the cost of requiring less than 1% of computational resources that famous transformer-based SOTA deep learning models for protein design require.
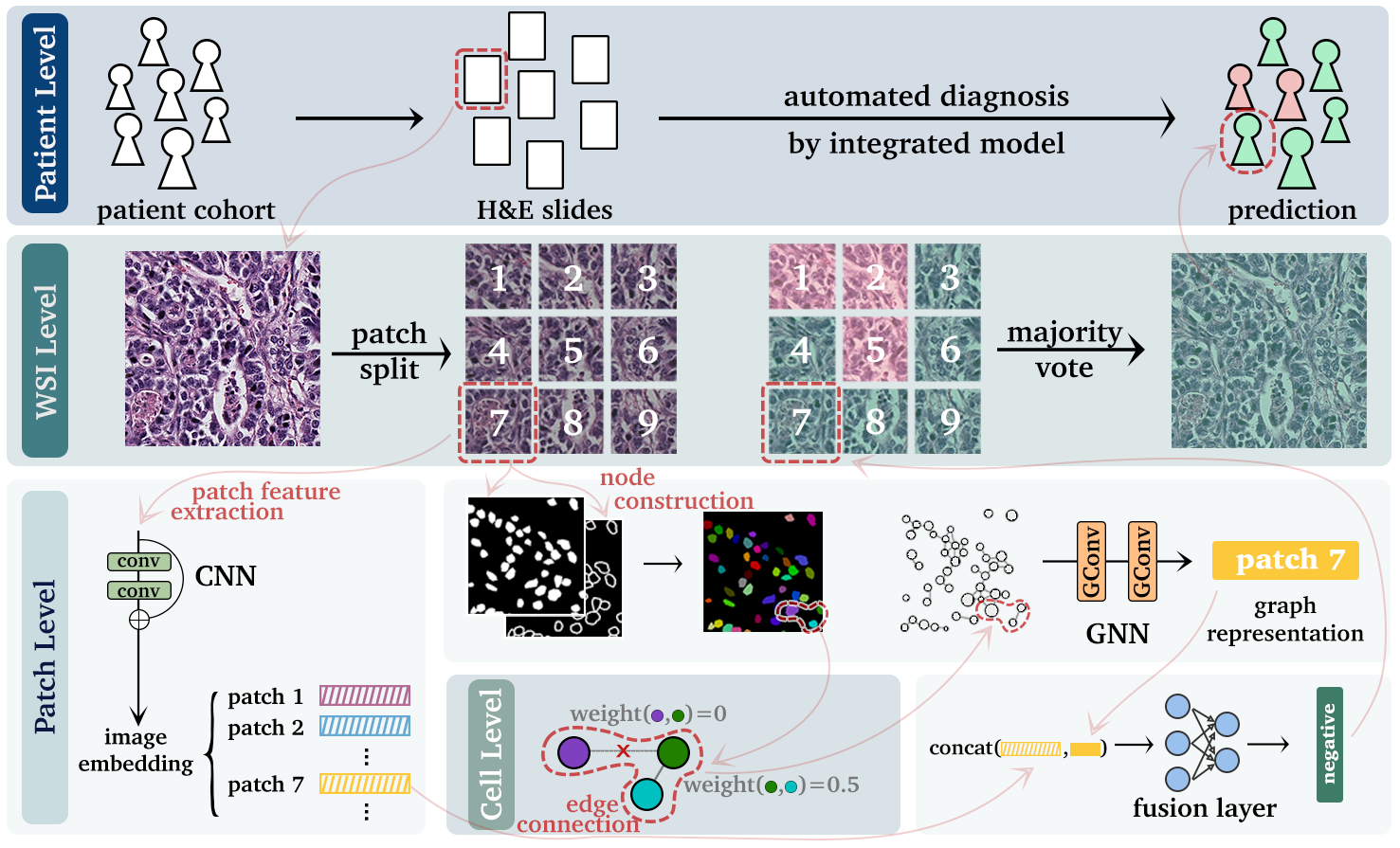
[Sep. 2021 - Apr. 2022] Medical Diagnosis: Integrating Convolutional Neural Networks and Graph Neural Networks [Paper] [Code]
Advised by Prof. Yuguang Wang
- Propose a fusion framework for enhancing the global image-level representation captured by CNNs with the geometry of cell-level spatial information learned by GNNs for downstream oncology tasks.
- Develop two fusion strategies optimizing an integration between collaborative features of global images and cell graphs, which can be generally applied to multiple networks.
- Evaluations on histology datasets have validated that fusion models outperform plain CNNs or GNNs and effectively reduce the cost of cancer diagnosis to design a stomach disease detection model.
[Sep. 2019 - Jun. 2021] Partial Differential Equations and Ordinary Differential Equations
Advised by Prof. Xiaoming Wang
- Investigate the modeling and numerical solutions of fluid partial differential equations.
- Build an infectious disease model based on multiple ordinary differential equations considering the effect of various factors.
- Predict the number of infected people and make predictions on COVID-19.
[Jun. 2018 - Oct. 2018] High-Resolution Photoacoustic Imaging
Advised by Prof. Lei Xi
- Generate high-resolution tissue images by measuring light-induced sound waves from its optically absorbing structures.
Publications
Exhaustiveness Does Not Necessarily Mean Better: Selective Task Planning for Multi-robot Systems [Paper]
Xinye Xiong, Xingyao Han, Zhe Liu, Hesheng Wang. 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO) (Under Review)
Traffic Flow Learning Enhanced Large-Scale Multi-Robot Cooperative Path Planning Under Uncertainties
Xingyao Han, Siyuan Chen, Xinye Xiong, Shunbo Zhou, Zhe Liu. 2024 IEEE International Conference on Robotics and Automation (ICRA) (Under Review)
Graph Representation Learning for Interactive Biomolecule Systems [Paper]
Xinye Xiong, Bingxin Zhou, Yu Guang Wang. arXiv
Lightweight Equivariant Graph Representation Learning for Protein Engineering[Paper]
Bingxin Zhou, Outongyi Lv, Kai Yi, Xinye Xiong, Pan Tan, Liang Hong, Yu Guang Wang. 2022 NeurIPS workshop on Machine Learning in Structural Biology
How Graph Neural Networks Enhance Convolutional Neural Networks Towards Mining the Topological Structures from Histology[Paper]
Yiqing Shen, Bingxin Zhou, Xinye Xiong, Ruitian Gao, Yu Guang Wang. ICML Workshop on Computational Biology 8
Awards and Honors
- Academic Scholarship of Shanghai Jiao Tong University
- Outstanding Graduate of the Faculty of Science in SUSTech (Top Ten)
- Distinguished Graduate of the Mathematics Department in SUSTech
- The first prize of SUSTech Outstanding Student Scholarship
- Sports Star of the Shuren College of SUSTech
- Third Prize in Mathematical Contest in Modeling for Chinese University Students
Others
[Oct. 2021 - Mar. 2022] AI Software Intern
Taize Chiptech, Shanghai, China
- ResNet-18 on FPGA: Design essential forward propagation functions and stack them to run on FPGA.
- VLIW Compiler Development: Cooperate with fulfilling AI operator library in assembly language.
- Fixed Issue: ResNet-18 running results on FPGA were inconsistent with those generated by PyTorch.
Women's Soccer
- Member of the Women's Soccer Team of SJTU.
- Captain of the Women's Soccer Team of SUSTech Shuren College.
- WFAXSJTU Club Organizer: the first team in China to promote walking soccer, a sport similar to soccer but forbidden from running. We established the club to attract people with relative physical strength, such as senior citizens, to exercise more through soccer.
See the PDF version of my Curriculum Vitae.